新聞中心
產品中心
聯系我們

深圳市東么川伺服控制技術有限公司
電話:13316379101
郵箱:1355229533@qq.com
地址:深圳市龍華區民治街道樟坑社區青創城A棟B502
步進電機計算旋轉運動實例方法
發布時間:2020-10-21 07:54:24
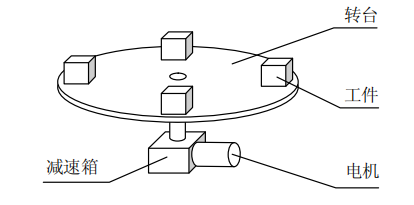
已知:一旋轉平臺如下圖所示,
最大角速度w = 0.5 rad /s ;(1 rad = 57.3o )
轉臺質量 Mo = 50 kg;半徑 R = 0.5 ms;
轉臺外緣有 4 個工件,質量各為 M = 5 kg
工件處重復定位誤差 £ 0.2 mm;
求:電機型號、減速箱減速比、減速箱型號(自己選擇)。
解:
1.電機速度、減速比的選擇:
最大轉速為 nmax = w / 2p = 0.5 / 2p = 0.159 r/s = 9.55 rpm
如果選用步進電機,最大速度取 500 rpm,
則,減速比 i = 50
2.定位精度的驗算:
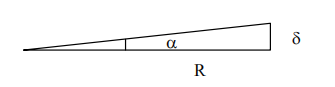
旋轉角的精度a = arctg ( d / R ) = arctg ( 0.2 /1000) /0.5 = 0.02292 度;
要求電機的定位精度am = a×i = 0.02292×50 = 1.146 度;
而步進電機的定位精度為 360 / 400 = 0.9 度。
故可選用步進電機。
3.力矩計算:
轉臺軸上的轉動慣量 J = 4×M R2 +(Mo/2)R2
= 4×10×0.52 + (50 / 2 )×0.52 = 16.25 kg m 2
轉臺的角加速度e = Dw / Dt = (0.5-0)/0.2 = 2.5 rad/s2
轉臺軸上的力矩 T = J e = 16.25×2.5 = 40.625 N m
電機軸上的力矩 Tm = T/ i = 40.625/50 = 0.8125 Nm
如果用行星齒輪減速箱,取安全系數為 2,電機力矩要大于 1.625 Nm。
如果用蝸輪蝸桿減速箱,取安全系數為 4,電機力矩要大于 3.25 Nm。
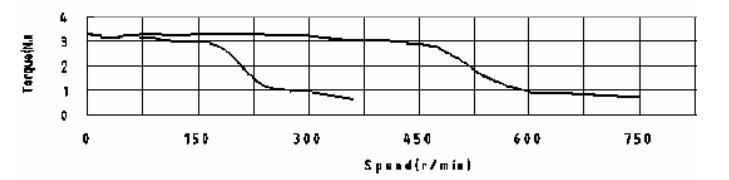
4.電機型號:
選用 86步進電機。其靜力矩為 4.5 Nm,其力矩速度曲線如下:
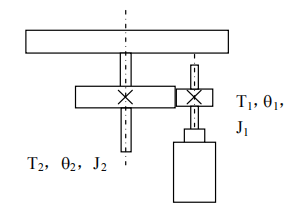
5.減速器與轉動慣量的關系:
設:負載(轉臺)轉動慣量為 J,減速箱、軸等慣量不計。
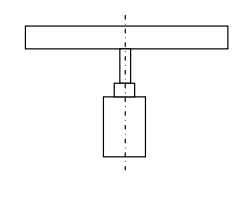
比較有減速器和無減速器的差別。
有減速箱,減速比為 i
無減速箱
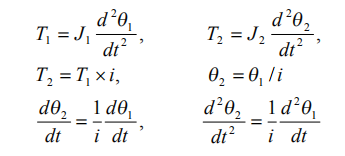
因為:
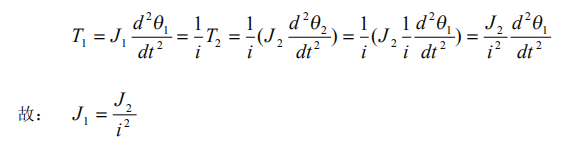
所以:
l 對于電機而言,使用減速箱有二個優點:一是力矩可減小 i 倍;二是負載慣量可減少
i2倍。
l 對應負載(轉臺)而言,不管有無減速器,力矩是一樣的。有減速器可以增加系統的
阻尼力,減小系統的振動,提高系統穩定性;但減速器有空回誤差問題。
- 上一篇:電機選型計算之計算直線運動方法實例
- 下一篇:步進電機品牌排行榜前十名
產品推薦:兩相步進電機





產品推薦:無刷電機






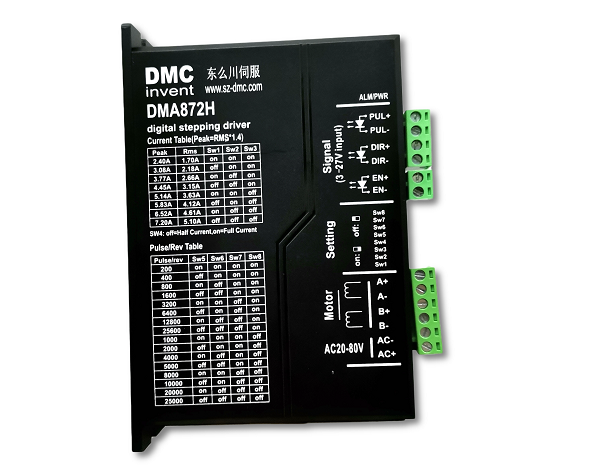
產品推薦:兩相步進驅動器






產品推薦:直流無刷驅動器






 地址 ADDRESS
地址 ADDRESS